With my advisors, Dr. Alex Slocum and Dr. Themis Sapsis, I used nonlinear mechanisms to increase the electricity generated from ambient vibrations. Please click on the image or read below to learn about the project. My master thesis and a journal article listed on the Publications page further describe this project.
Challenge
- Ambient vibrations are stochastic multi-frequency, and time-varying.
- Traditional linear oscillators can only absorb ambient energy at one frequency.
- Example scenarios:
-
- Ambient vibration energy harvesting
-
- Cell phones carried by people.
- Ocean wave utility-scale generators.
- Small electroincs in remote locations.
- MEMs sensors implanted in the body.
- Shock absorption
-
- Protect offshore platforms from water wave impacts.
Solution
- Nonlinear oscillators are more robut to vibration signal changes than linear systems
-
- Many studies have shown that energy absorption by a nonlinear system depends more on the energy level of the ecxitation signal than the frequency of the excitation signal.
- Traditional linear oscillators can only absorb ambient energy at one frequency.
-
- This is a pasive solution which may be more robust and energy-efficient than using controls.
Design a nonlinear spring
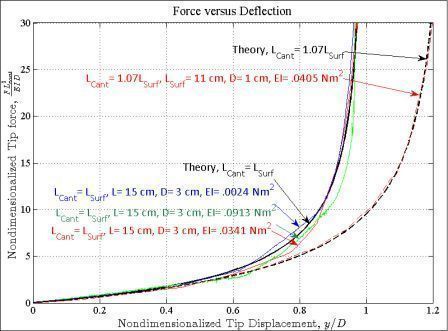
- We design an essentially nonlinear spring (i.e. its entire force-versus-deflection behavior is nonlinear), which many studies have shown to be critical for generating power over a large range of excitation signals.
- The chosen design has low friction and only one moving part (which increases device lifetime).
- The spring stiffness increases as the cantilever wraps around the rigid surface and shorter length of the cantilever is able to bend.
-
- The stiffness of a cantilever is 3EI/L^3. Here, L decreases as additional force is appled.

Case study: Power a cell phone from a person walking
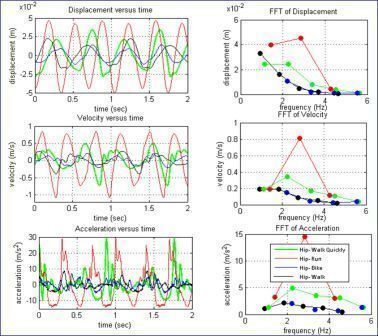
- We study the electricity generated by an energy harvester that is excited by the motion of a person's hip while walking, walking quickly, and running.
- These different excitation signals represent how a person walks differently thorughout the day
- We restrict all of the systems to have a total mass of 60g (for the 2DOF systems, each mass is 30 g), and allowable peak-peak displacement of 6.8 cm. This displacement constraint represents the device outer casing.
- We simulate the generation of electricity by adding electromagnetic damping to the system.
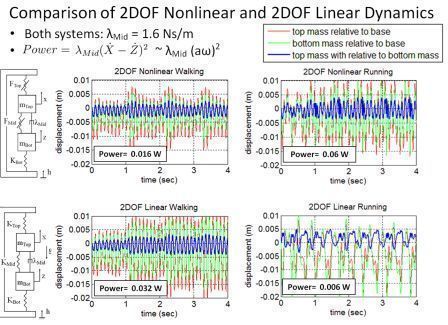
- As shown below, only the nonlinear systems have a set of parameters that can generate a significant (>0.01 W) power for both walking and running.
|
| Times series and FFTs of the human motion signals |
System |
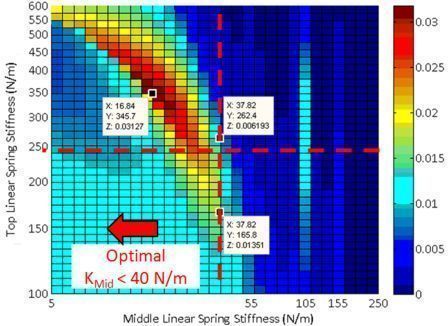
Power Generated while Walking versus Parameters |
Power Generated while Running versus Parameters |
1DOF linear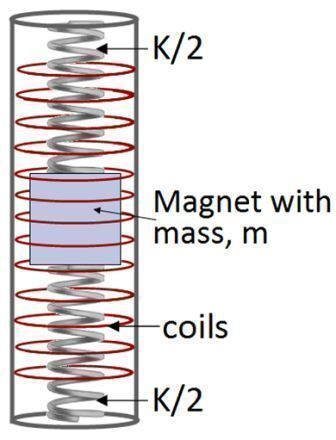 |
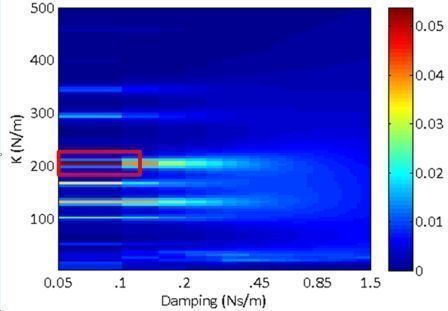 |
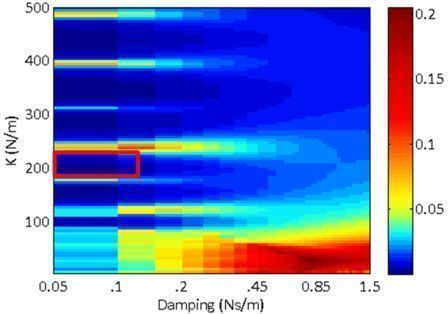 |
1DOF nonlinear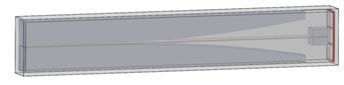 |
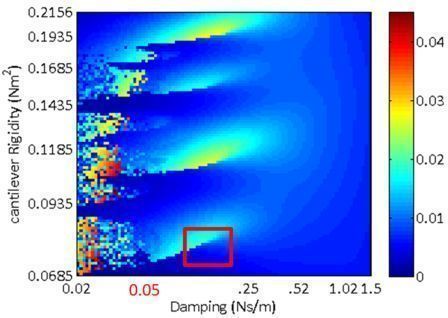 |
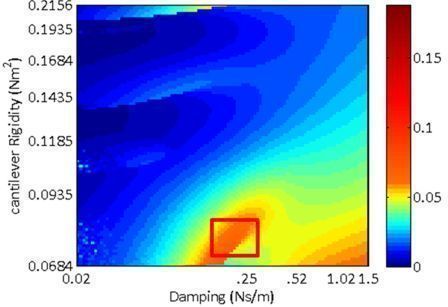 |
2DOF linear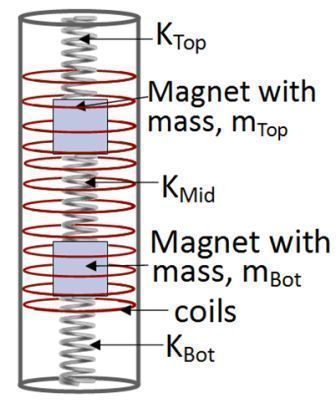 |
 |
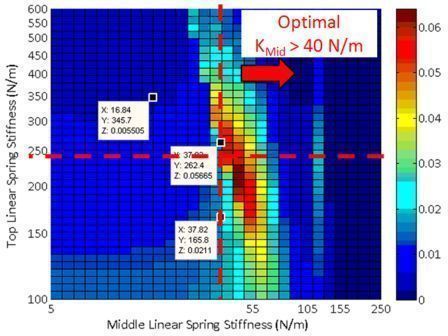 |
2DOF nonlinear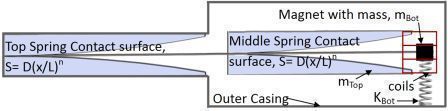 |
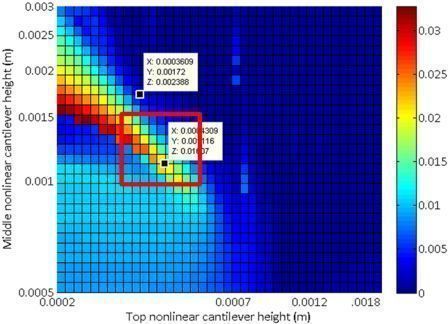 |
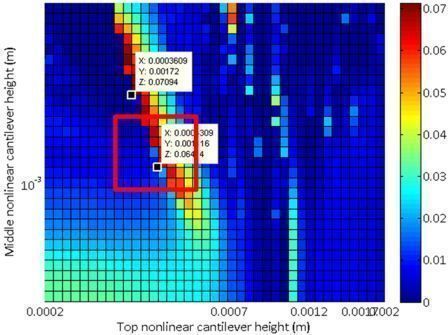 |
|
Conclusions
Nonlinearity makes the system more robust to environmental vibration specturm changes and the presence of parasitic damping.
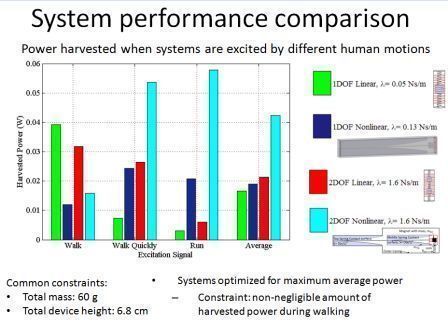
|
| Power harvested by the optimized systems |
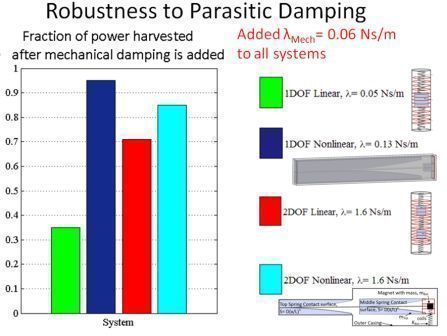
|
| Effect of parasitic damping |
Future Work
- Build and test full prototypes with electromagnetic system
- Modify contact-surface stiffening-spring effect to be more volume-compact
- Analytically study stochastic nonlinear dynamics to predict maximum power and robustness
- Apply concepts to utility-scale ocean-wave electricity generation
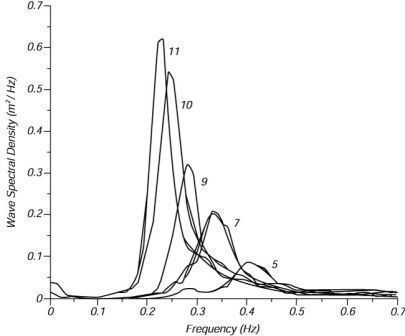
|
| Ocean wave spectra of different sea states, from Hasselmann?et al., (1973) |